task1 <<
Previous Next >> w11 Task2
task2
下載coppeliasim 4.2.0 版本 4.2.0 版.

下載 http://mde.tw/cad2020/downloads/coppeliasim/vrep_remoteapi_ex.7z

將remoteApi.dll / sim.py /simComst.py 複製島bubble 資料夾當中
將 bubblerote_remoteApi.py 拉進小白框當中
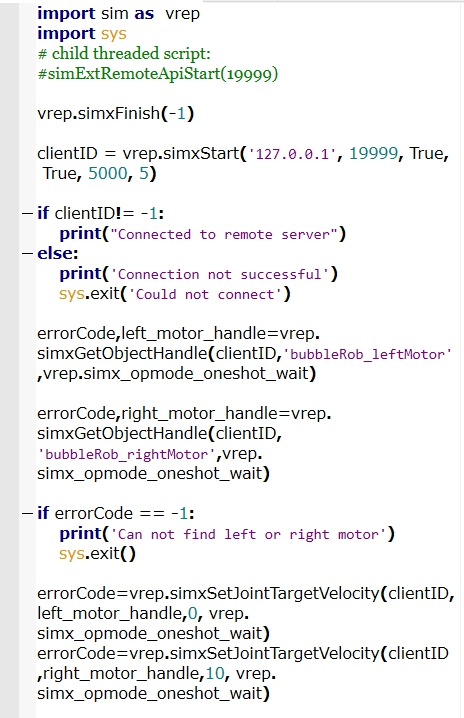
修改內容 {將import vrep修改為 import sim as vrep}
在小白框按 Tools/go
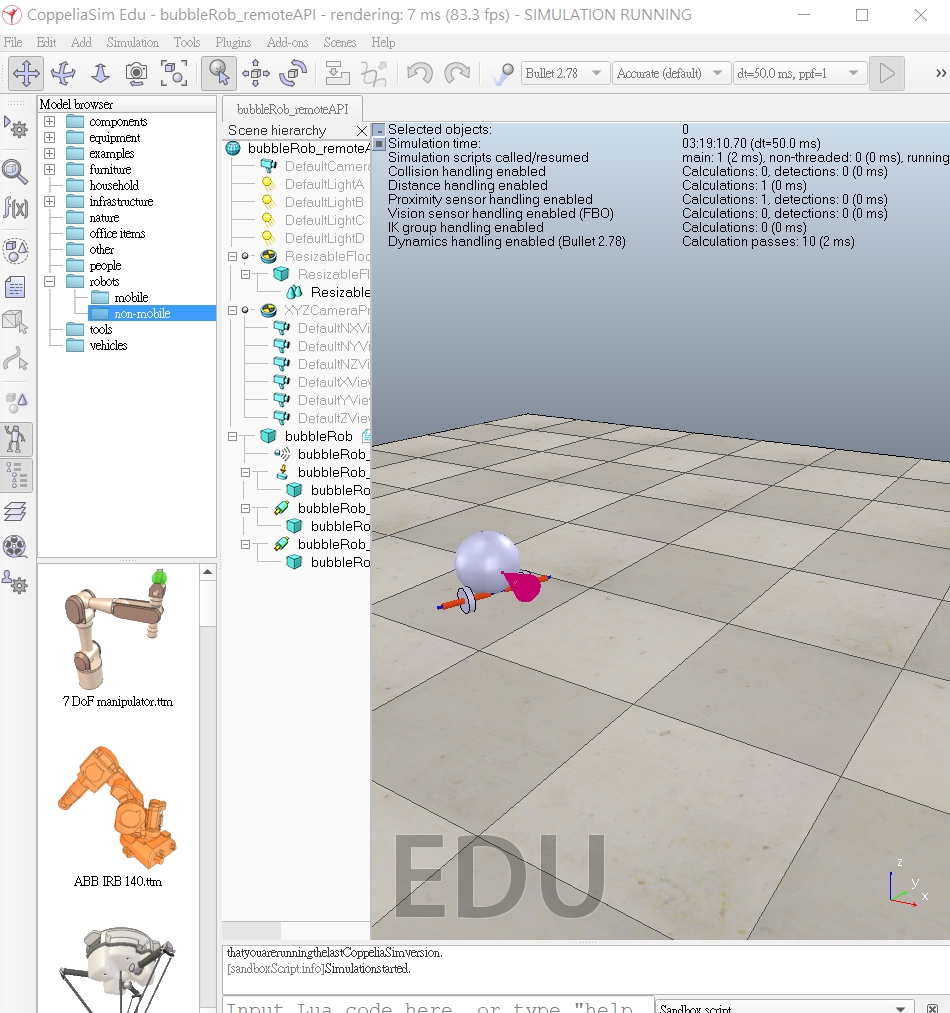
在進入coppeliasim 叫出小車 進行操作
task1 <<
Previous Next >> w11 Task2